dls = DataLoaders.from_hf("fashion_mnist", nworkers=2)Learner
Building a framework for the deep learning workflow. A large chunk of this code, in particular, was copied from the course notebook because I’m not interested in the software developer aspects of the course. (I am already a professional software developer.)
Adapted from:
- https://youtu.be/0Hi2r4CaHvk?si=GA9KaGAnGOlS_NJO&t=3568
- https://github.com/fastai/course22p2/blob/master/nbs/09_learner.ipynb
At this point, Jeremy points out that copying and pasting code leads to bottlenecks in modeling velocity. We need to start to build a framework to:
- rapidly try things
- figure out where things are broken
- load data quickly
- transparently assign CUDA devices
Data
We’ll start with a wrapper around datasets to make it simpler to work with raw PyTorch.
DataLoaders
def DataLoaders(
splits, nworkers:int=2, bs:int=32, collate_fn:function=default_collate, tdir:str='/tmp/tmp8__qix2w'
):
Wrapper around huggingface datasets to facilitate raw pytorch work
dls.splits.set_format("torch") # This will be overwritten in a second
batch = dls.peek()
batch["image"].shape, batch["label"].shape(torch.Size([32, 28, 28]), torch.Size([32]))We should also add some helpers to facilitate processing images.
tensorize_images
def tensorize_images(
dls, feature:str='image', normalize:bool=True, pipe:list=[PILToTensor(), ConvertImageDtype()]
):
Tensorize and normalize the image feature
batchify
def batchify(
f
):
Convert a function that processes a single feature to processing a list of features
T.Normalize?Init signature: T.Normalize(mean, std, inplace=False) Docstring: Normalize a tensor image with mean and standard deviation. This transform does not support PIL Image. Given mean: ``(mean[1],...,mean[n])`` and std: ``(std[1],..,std[n])`` for ``n`` channels, this transform will normalize each channel of the input ``torch.*Tensor`` i.e., ``output[channel] = (input[channel] - mean[channel]) / std[channel]`` .. note:: This transform acts out of place, i.e., it does not mutate the input tensor. Args: mean (sequence): Sequence of means for each channel. std (sequence): Sequence of standard deviations for each channel. inplace(bool,optional): Bool to make this operation in-place. Init docstring: Initializes internal Module state, shared by both nn.Module and ScriptModule. File: ~/micromamba/envs/slowai/lib/python3.11/site-packages/torchvision/transforms/transforms.py Type: type Subclasses:
dls = DataLoaders.from_hf("fashion_mnist", nworkers=0)
dls = tensorize_images(dls)
xb = dls.peek()["image"]
show_images(xb[:8, ...], figsize=(8, 4))
xb.min(), xb.max()(tensor(-0.8286), tensor(2.0066))Notice that this unit-normalized
plt.hist(xb.view(-1))(array([13418., 607., 687., 1014., 1057., 1076., 1408., 2054.,
2393., 1374.]),
array([-0.82863587, -0.5451138 , -0.26159173, 0.02193036, 0.30545244,
0.58897448, 0.8724966 , 1.15601861, 1.43954074, 1.72306275,
2.00658488]),
<BarContainer object of 10 artists>)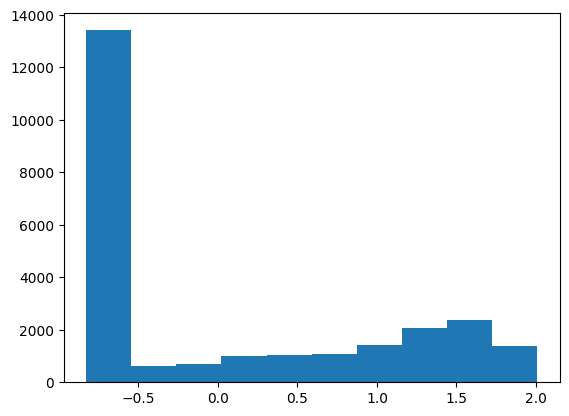
Learner and callbacks
Next, we’ll add a learner with callbacks. Recall, this was our earlier fit function:
fit??Signature: fit(epochs, model, loss_func, opt, train_dl, valid_dl, tqdm_=False) Docstring: <no docstring> Source: def fit(epochs, model, loss_func, opt, train_dl, valid_dl, tqdm_=False): progress = tqdm if tqdm_ else lambda x: x for epoch in range(epochs): model.train() for batch in progress(train_dl): xb, yb = map(to_device, batch) loss = loss_func(model(xb), yb) loss.backward() opt.step() opt.zero_grad() model.eval() with torch.no_grad(): tot_loss, tot_acc, count = 0.0, 0.0, 0 for batch in progress(valid_dl): xb, yb = map(to_device, batch) pred = model(xb) n = len(xb) count += n tot_loss += loss_func(pred, yb).item() * n tot_acc += accuracy(pred, yb).item() * n print( f"{epoch=}, validation loss={tot_loss / count:.3f}, validation accuracy={tot_acc / count:.2f}" ) return tot_loss / count, tot_acc / count File: ~/Desktop/SlowAI/nbs/slowai/convs.py Type: function
To add callbacks, we need a few clever Exception control flow signals
CancelEpochException
def CancelEpochException(
args:VAR_POSITIONAL, kwargs:VAR_KEYWORD
):
Skip to the next epoch
CancelBatchException
def CancelBatchException(
args:VAR_POSITIONAL, kwargs:VAR_KEYWORD
):
Skip to the next batch
CancelFitException
def CancelFitException(
args:VAR_POSITIONAL, kwargs:VAR_KEYWORD
):
Exit fit context
Then, we define the learner and callback classes
Callback
def Callback(
args:VAR_POSITIONAL, kwargs:VAR_KEYWORD
):
Modify the training behavior
with_cbs
def with_cbs(
nm
):
Run the callbacks lifecycle at the apropriate time
only
def only(
f
):
If the lifecycle hook is decorated as such, only run this hook and not other callbacks’ hooks
Learner
def Learner(
model, dls, loss_func:function=mse_loss, lr:float=0.1, cbs:NoneType=None, opt_func:type=SGD
):
Flexible training loop
This learner delegates all aspects of model training to callbacks, so something like this is neccesary.
TrainCB
def TrainCB(
args:VAR_POSITIONAL, kwargs:VAR_KEYWORD
):
Training specific behaviors for the Learner
Now that we have the basic scaffolding, we’ll add metrics. Updating and storing state will be handled by torchmetrics, but we’ll define a callback to orchestrate the torchmetrics instances.
MetricsCB
def MetricsCB(
ms:VAR_POSITIONAL, metrics:VAR_KEYWORD
):
Update and print metrics
Finally, we can define a Trainer callback specifically for the autoencoder objective.
class TrainAutoencoderCB(TrainCB):
"""Modify the training loop for the ELBO objective"""
def predict(self, learn):
xb, *_ = learn.batch
learn.preds = learn.model(xb)
def get_loss(self, learn):
xb, *_ = learn.batch
learn.loss = learn.loss_func(learn.preds, xb)Let’s also define some additional useful callbacks and dataset helpers:
ProgressCB
def ProgressCB(
plot:bool=False, periodicity:int=10
):
Report the progress
before
def before(
callback_cls:Union
):
Run a callback before another callback
after
def after(
callback_cls:Union
):
Run a callback after another callback
DeviceCB
def DeviceCB(
device:str='cpu'
):
Move tensors and model to the CPU/GPU/etc
to_cpu
def to_cpu(
x
):
fashion_mnist
def fashion_mnist(
bs:int=2048, kwargs:VAR_KEYWORD
):
Helper to use fashion MNIST
DataLoaders??Init signature: DataLoaders( splits, nworkers: int = 6, bs=32, collate_fn=<function default_collate at 0x7f88ed959120>, tdir='/tmp/tmpmsi_fg04', ) Docstring: Wrapper around huggingface datasets to facilitate raw pytorch work Type: type Subclasses:
Putting it all together
model = get_ae_model()
dls = fashion_mnist()
print(dls.splits["train"].format)
cbs = [
MetricsCB(),
DeviceCB(),
TrainAutoencoderCB(),
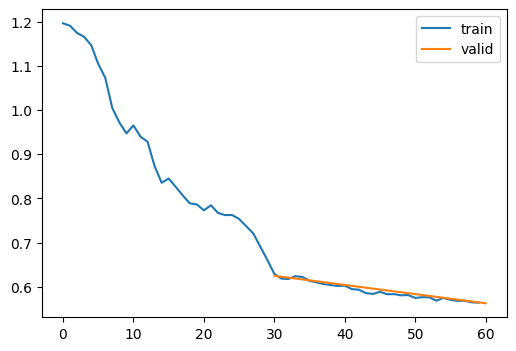
ProgressCB(plot=True),
]
learn = Learner(
model,
dls,
F.mse_loss,
lr=0.01,
cbs=cbs,
opt_func=torch.optim.AdamW,
).fit(2){'type': 'custom', 'format_kwargs': {'transform': <function DataLoaders.with_transforms.<locals>.map_ at 0x7f885457b1a0>}, 'columns': ['image', 'label'], 'output_all_columns': False}| loss | epoch | train |
|---|---|---|
| 1.071 | 0 | train |
| 0.955 | 0 | eval |
| 0.908 | 1 | train |
| 0.854 | 1 | eval |
CPU times: user 3.98 s, sys: 2.42 s, total: 6.4 s
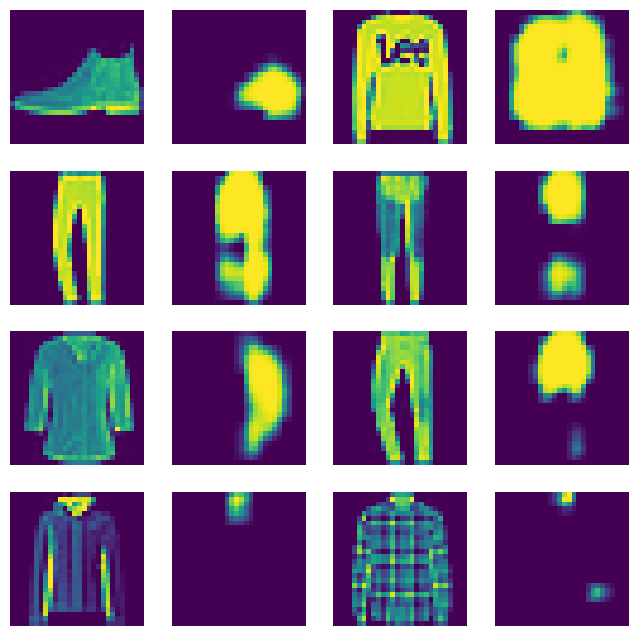
Wall time: 11.2 sdef viz(model, xb):
xb = xb.to(def_device)
pred = model(xb)
paired = []
for i in range(min(xb.shape[0], 8)):
paired.append(xb[i, ...])
paired.append(pred[i, ...])
show_images(paired, figsize=(8, 8))xbt, _ = dls.peek("test")
viz(model, xbt)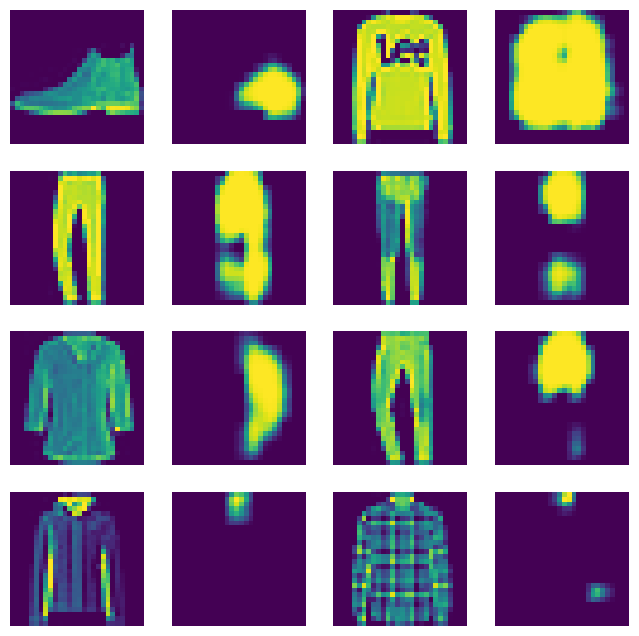
Still not good, but less code!
I don’t really like the idea of delegating the core training functions to callbacks, so we can just implement them here:
TrainLearner
def TrainLearner(
model, dls, loss_func:function=mse_loss, lr:float=0.1, cbs:NoneType=None, opt_func:type=SGD
):
Sane training loop
This works pretty similarly
class AutoencoderTrainer(TrainLearner):
def predict(self):
xb, *_ = self.batch
self.preds = self.model(xb)
def get_loss(self):
xb, *_ = self.batch
self.loss = self.loss_func(self.preds, xb)
cbs = [MetricsCB(), DeviceCB(), ProgressCB(plot=True)]
learn = AutoencoderTrainer(
get_ae_model(),
dls,
F.mse_loss,
lr=0.01,
cbs=cbs,
opt_func=torch.optim.AdamW,
).fit(2)| loss | epoch | train |
|---|---|---|
| 0.950 | 0 | train |
| 0.585 | 0 | eval |
| 0.566 | 1 | train |
| 0.556 | 1 | eval |
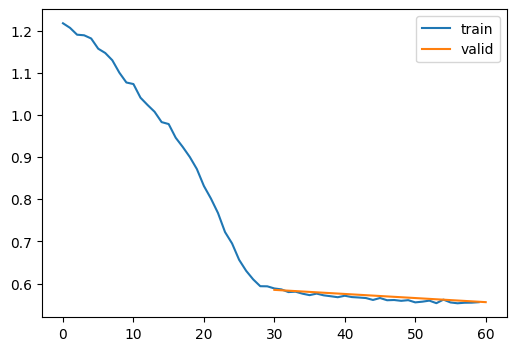
CPU times: user 1.24 s, sys: 1.37 s, total: 2.61 s
Wall time: 8.12 sCan we improve the reconstruction? Let’s implement a simple momentum.
MomentumCB
def MomentumCB(
momentum:float=0.85
):
Modify the training behavior
cbs = [MetricsCB(), DeviceCB(), ProgressCB(plot=True), MomentumCB()]
learn = AutoencoderTrainer(
get_ae_model(),
dls,
F.mse_loss,
lr=0.01,
cbs=cbs,
opt_func=torch.optim.AdamW,
).fit(2)
viz(model, xbt)| loss | epoch | train |
|---|---|---|
| 1.254 | 0 | train |
| 1.209 | 0 | eval |
| 1.184 | 1 | train |
| 1.148 | 1 | eval |
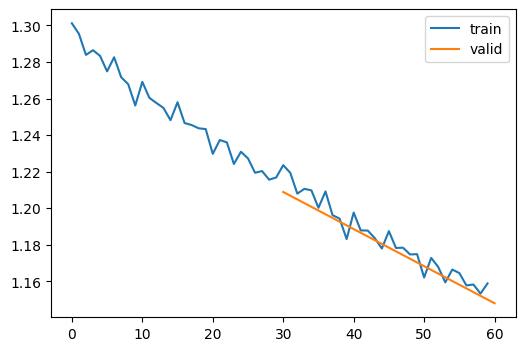
CPU times: user 1.46 s, sys: 1.41 s, total: 2.87 s
Wall time: 8.6 s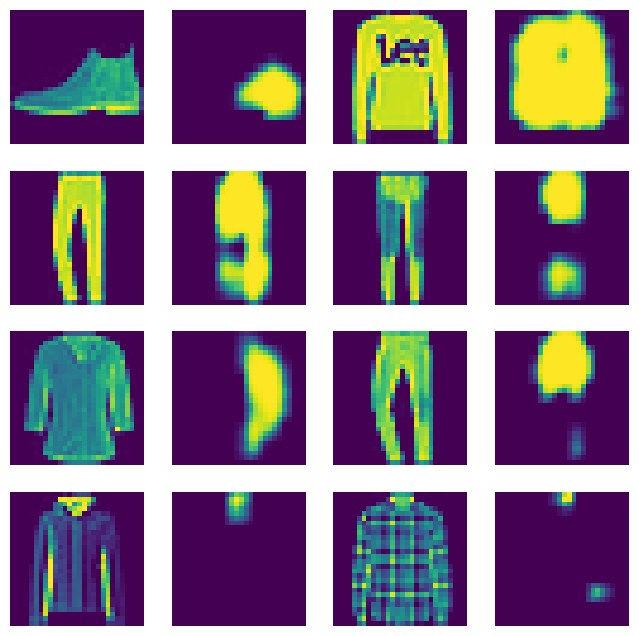
Not especially impressive.
What about using the automated learning rate finder?
show_doc
def show_doc(
sym, # Symbol to document
renderer:NoneType=None, # Optional renderer (defaults to markdown)
name:str | None=None, # Optionally override displayed name of `sym`
title_level:int=3, # Heading level to use for symbol name
):
Show signature and docstring for sym
LRFinderCB
def LRFinderCB(
gamma:float=1.3, max_mult:int=3
):
Find an apopriate learning rate by increasing it by a constant factor for each batch until the loss diverges
learn = AutoencoderTrainer(
get_ae_model(),
dls,
F.mse_loss,
lr=1e-5,
cbs=cbs,
opt_func=torch.optim.AdamW,
).lr_find()
20.00% [2/10 00:07<00:29]
| loss | epoch | train |
|---|---|---|
| 1.294 | 0 | train |
| 1.068 | 1 | train |
56.67% [17/30 00:01<00:01 1.987]
/home/jeremy/micromamba/envs/slowai/lib/python3.11/site-packages/torchmetrics/utilities/prints.py:43: UserWarning: Encountered `nan` values in tensor. Will be removed.
warnings.warn(*args, **kwargs) # noqa: B028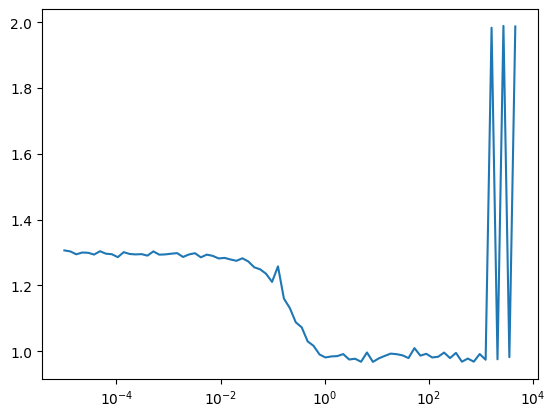
It looks like 1e-2 is a good learning rate.
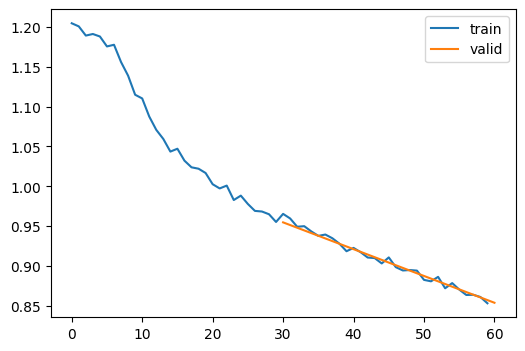
cbs = [MetricsCB(), DeviceCB(), ProgressCB(plot=True), MomentumCB()]
learn = AutoencoderTrainer(
get_ae_model(),
dls,
F.mse_loss,
lr=1e-2,
cbs=cbs,
opt_func=torch.optim.AdamW,
).fit(2)
viz(model, xbt)| loss | epoch | train |
|---|---|---|
| 0.905 | 0 | train |
| 0.625 | 0 | eval |
| 0.592 | 1 | train |
| 0.563 | 1 | eval |
Again, not especially impressive.
We’ll write some tools to diagnose model issues in the next notebook.